在DICOM中,是通过Image Position和Image Orientation来描述当前的图像和人体坐标系的相对位置的。
打开DCM文件时,会发现下边的两个tag
(0020,0032) DS ImagePosition(Patient) "-20.000000\-150.000000\150.000000 "
(0020,0037) DS ImageOrientation(Patient) "0.000000\1.000000\0.000000\0.000000\0.000000\-1.000000"
也就是这两个tag来描绘出当前图像的位姿情况,也就是用这两个量来进行定位线的计算,VR,MPR的空间计算。
要想理解这两个量,首先要搞明白在三维空间中的坐标变换,这个变换包括位置变换和姿态的变换,也就是运动学中常常称作的位姿变换。首先有原始坐标系o,
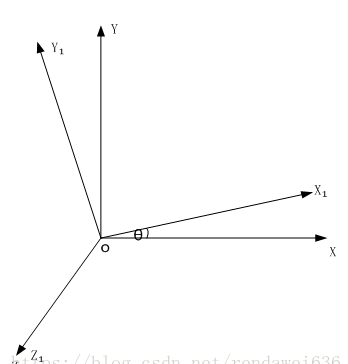
其中,O₁坐标系是绕z轴以O系统的基础上旋转了θ的一个角度,我们可以把这个矩阵记录为
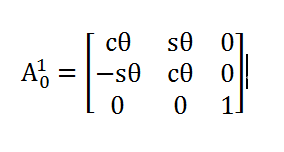
,那么依次类推,通过一系列这样的变换,我们可以得到最终的变换矩阵为。
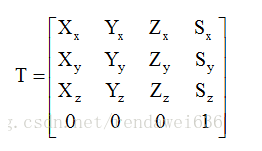
这里,我们把T记为
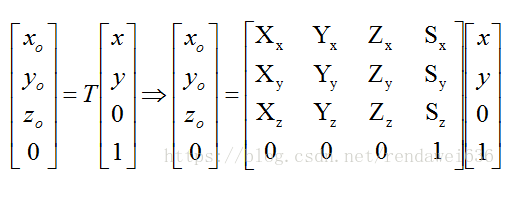
但是我们知道我们图像是一个2维的量,由于当前图像像素点的z方向坐标相对于当前图像的坐标系的值都为0,当前图像的坐标点可以用(x,y,0)的向量来表示,表示在齐次坐标方式就为(x,y,0,1)。那么,这时想要计算出图像上的某个点相对于原始坐标系的坐标,就直接和转换矩阵T相乘即可,记为
所以,Image Orientation的6个量就显而易见为
Xx,Xy,Xz,Yx,Yy,Yz
。Image Position中的三个量为
Sx,Sy,Sz
原始坐标系,规定人体的左边是X轴的方向,从面部指向背部的方向表示y轴的方向。Dicom中规定的坐标系是以人坐标系为绝对坐标系的。
下面给一个旋转坐标推导的实例,
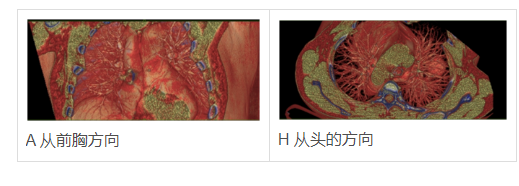
1 VR应用中由A(从前胸方向)方位转换到H(从头方向)位置的转化
2 旋转矩阵推导过程
2.0 Step0 原始坐标系展示
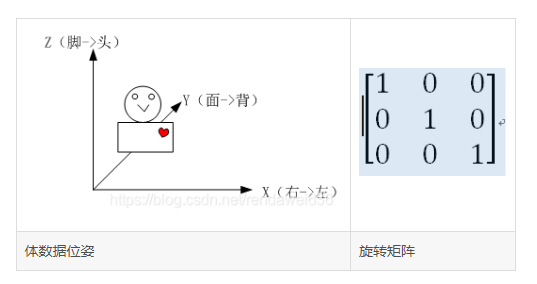
体数据位姿旋转矩阵
2.1 Step1 绕X轴旋转90度
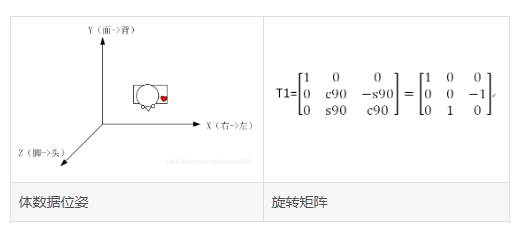
体数据位姿旋转矩阵
2.2 step2 绕z轴旋转再旋转180度
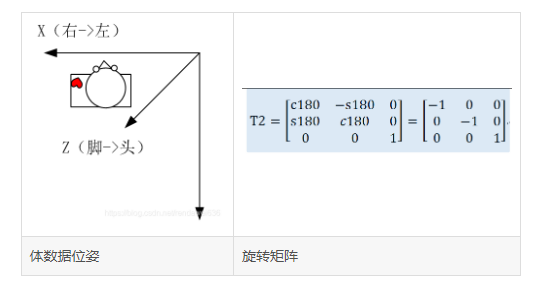
体数据位姿旋转矩阵
最后得到旋转矩阵,
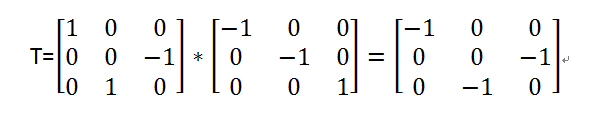
这个矩阵的含义是,Step2后的坐标系,相对于原始坐标系的旋转矩阵。在实际的项目中,可以直接用此矩阵来和体数据中的像素点的坐标进行相乘,就能得到体数据中像素的坐标点在原始坐标系中的坐标。
————————————————
版权声明:本文为CSDN博主「恒哥的爸爸」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/rendaweibuaa/article/details/80960386